Lab2
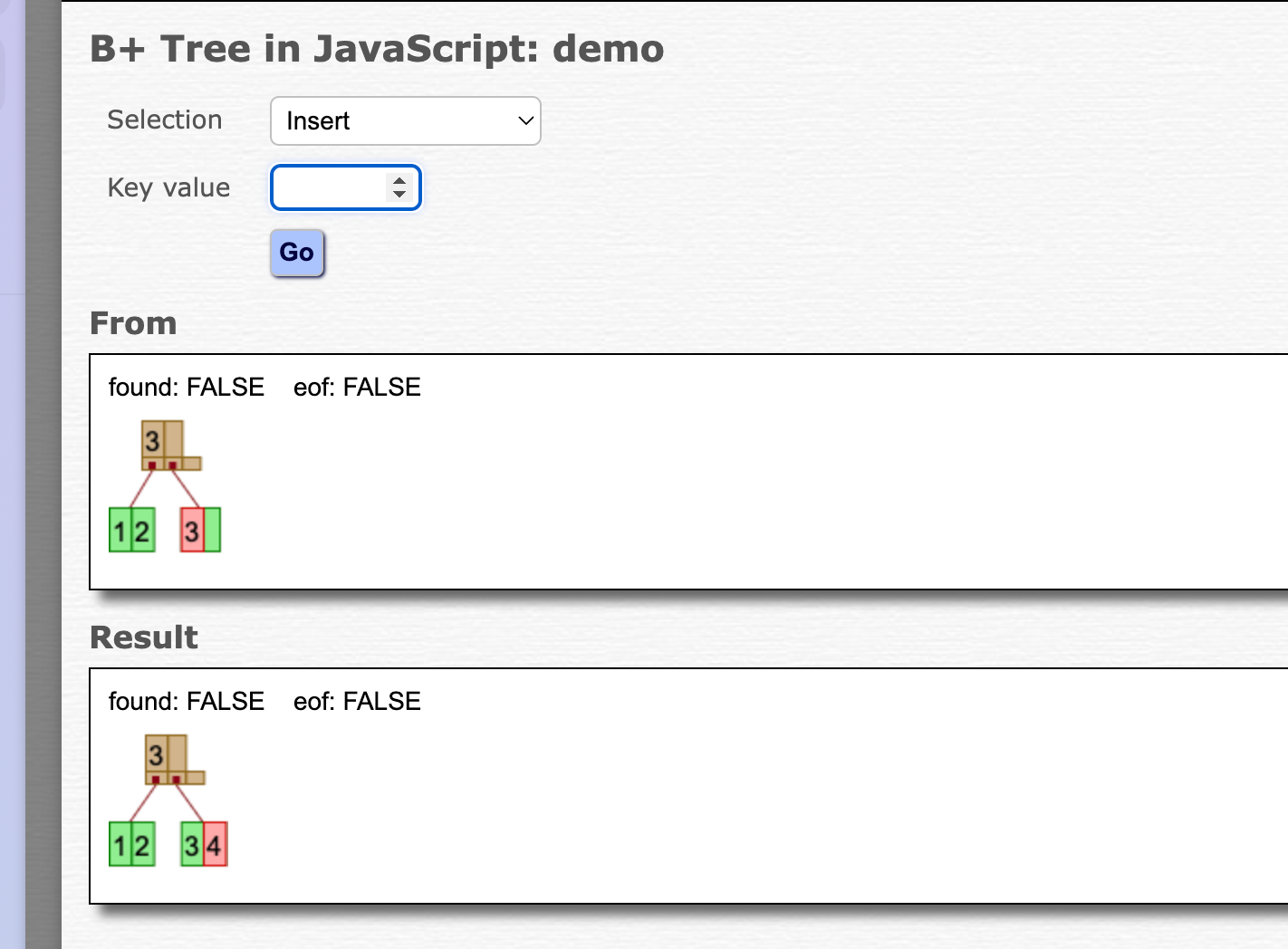
对于Lab的debug,由于并没有开放测试样例,因此最好的就是找一个合适的b+树的模拟动画,然后再使用官方的画图工具比较自己的B+树,一般3-4层没有问题了大多就是没有问题了,把分裂、合并、重分配等各种情况全部涉及到一次基本就可以了。
B+树演示动画推荐官方的,其他的可能多少都会有点bug或者实现方式不太一样
https://15445.courses.cs.cmu.edu/fall2022/bpt-printer/
Task1
分别实现 Parent Page Internal Page Leaf Page,按照注释实现即可,较为简单
注意一下arrry_[1]的使用方式即可
flexible array
这里可以参考十一大佬的解释,描述的非常详细:flexible array
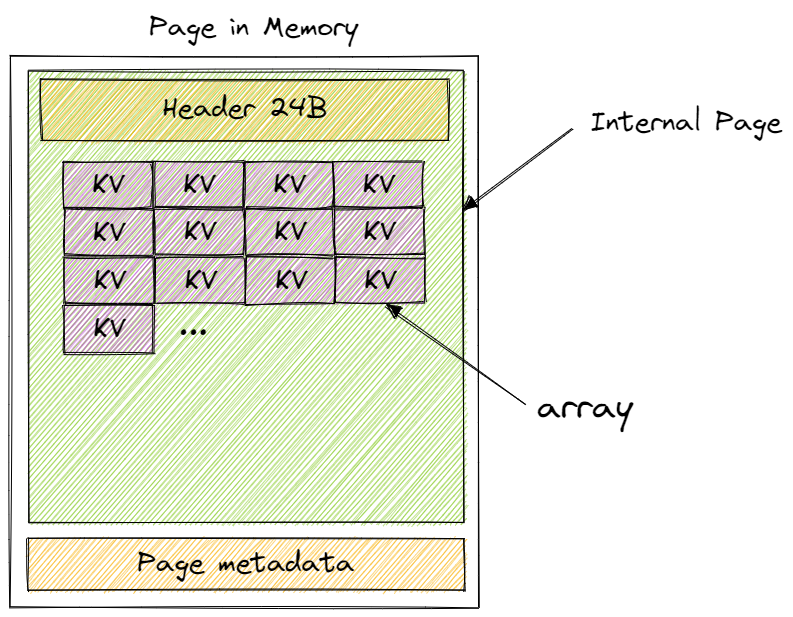
array_[1]所采用的是一种flexible array的实现方式,即不指定一个数据的大小,将其封装到一个对象当中,对整个对象分配一个确定的大小,除去已经使用的空间,剩余的空间均可为array_[1]所使用。
对于一个Internal Page,BUSTUB_PAGE_SIZE定义的为4KB,即4096B,除去从父类继承而来的6个字段各占4B,其他剩余的所有内存均供flexible array来使用
Page and BPlusTreePage
就像上面的图画的那样,这二者之间并不存在继承或者实现的关系,二者在类的定义上为并列的关系,并不像是在6.830的simpledb 当中通过BPlusTreePage去实现Page接口。
B+树的一个Page作为索引而存在,而叶子节点即是索引又是真实的存储单元(即存储Tuple对应的RID,非聚簇索引实现)。
即当要读取一个tuple时,首先根据保存的root_page_id去找到根节点,通过buffer_pool_manager将其加载到内存当中,而root_page是作为Page的数据维护在内存当中,Page当中的data_为一个4KB的字节数组,通过reinterpret_cast将其重新解释为BPlusTreePage,后续在其中搜索到对应的Key,在通过buffer_pool_manager去找到下一个节点,直至最后找到叶子节点,并通过RID再去读取到tuple。
而对于HeapFile的实现方式,则是找到一个表的HeapFile,然后遍历不断读取其中的HeapPage,通过bufffer_pool_manager将其加载到内存当中,再遍历HeapPage当中的所有的tuple,直至找到对应的tuple。
节点实现
节点大小
先说一个数据库系统概念当中对大小的定义:
首先对于内部节点和叶子节点的大小都基于Max Degree n
- 对于叶子节点max_size为n-1个kv,min_size为(n-1)/2向上取整
- 对于内部节点max_size为n个指针,n-1个k,min_size为n/2向上取整个指针
在Lab当中,对于一棵B+树,并没有制定Max Degree,而是分成leaf_max_size和internal_max_size来定义的,可以分开设置但是二者理论上应该是相等的:在是否需要分裂的判断时,Lab给出的逻辑是:internal_max_size在插入前进行判断,leaf_max_size在插入后进行判断,因此即可保证内部节点可以比叶子节点多容纳一个指针。
因此对于min_size的求法:
- leaf_node: n / 2
- internal_node (n + 1) / 2
不减一直接除可以与-1之后向上取整等价。
实现方式
在一个Page内部通过array_[1]来保存所有的KV,array_[1]的元素类型为一个KV键值对,对于叶子节点的实现较为便捷,kv的数量相等,直接从头开始填充即可,在bustub所实现的为非聚簇索引,因此key即为设置索引的键,value即为RecordId。在通过索引找到了RecordId之后再使用RecordId在一个Page当中去进行偏移读取。
如果想MySQL那样的话主键索引锁存储的为整个tuple,二级索引存储的则是索引和主键,通过二级索引进行查询,需要通过一个回表的过程。
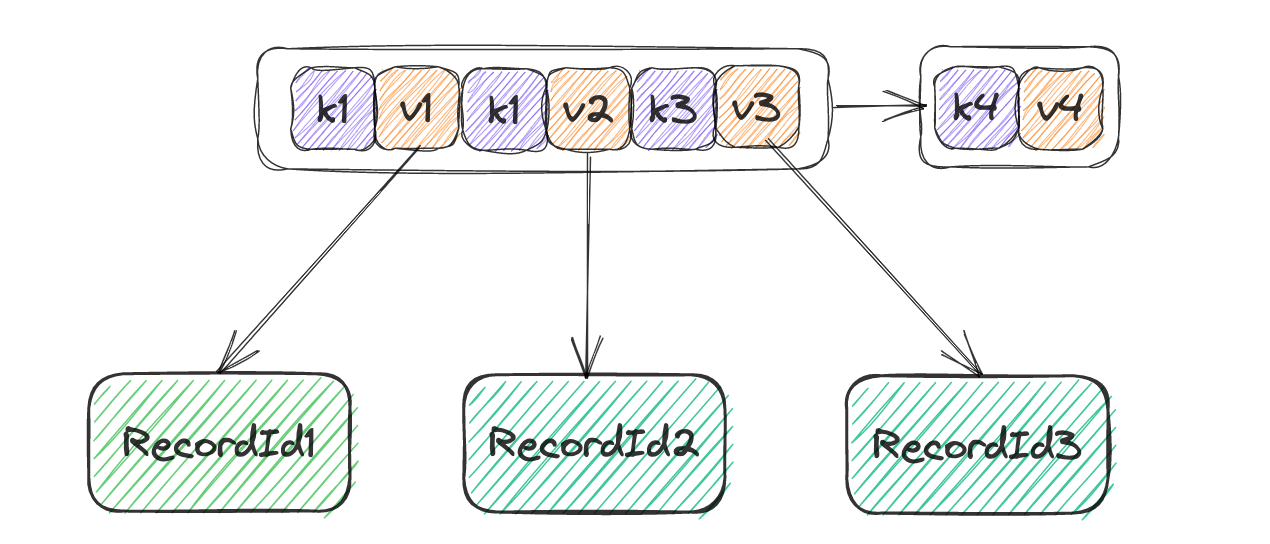
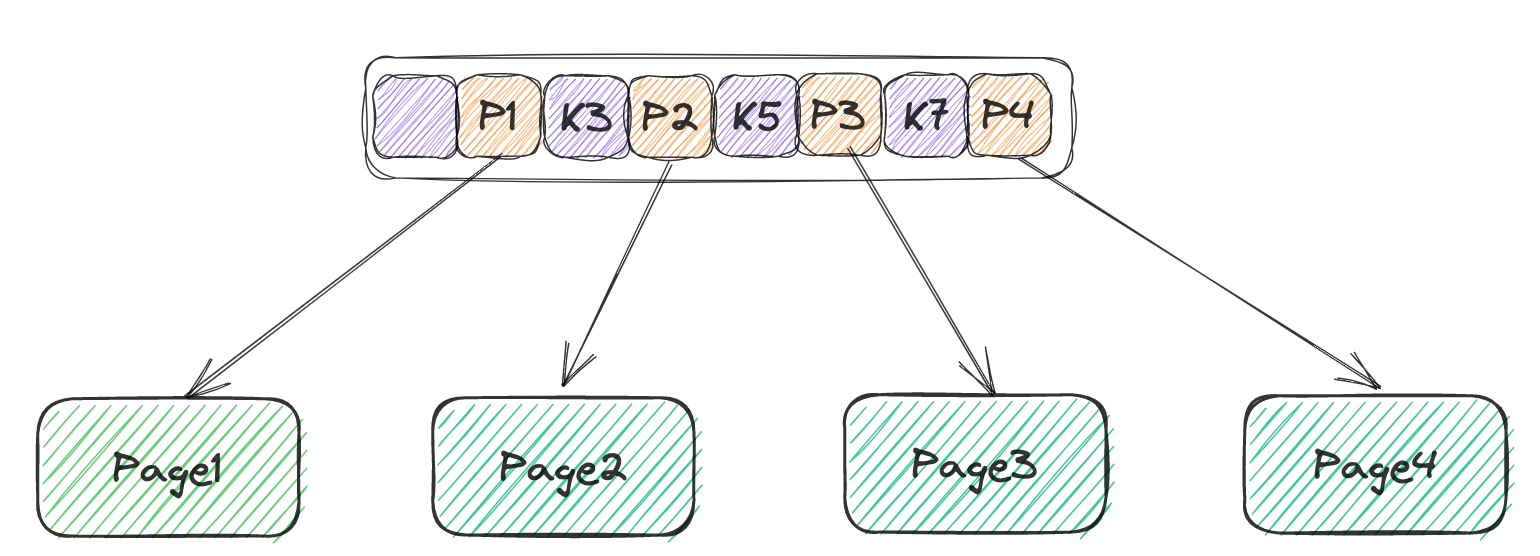
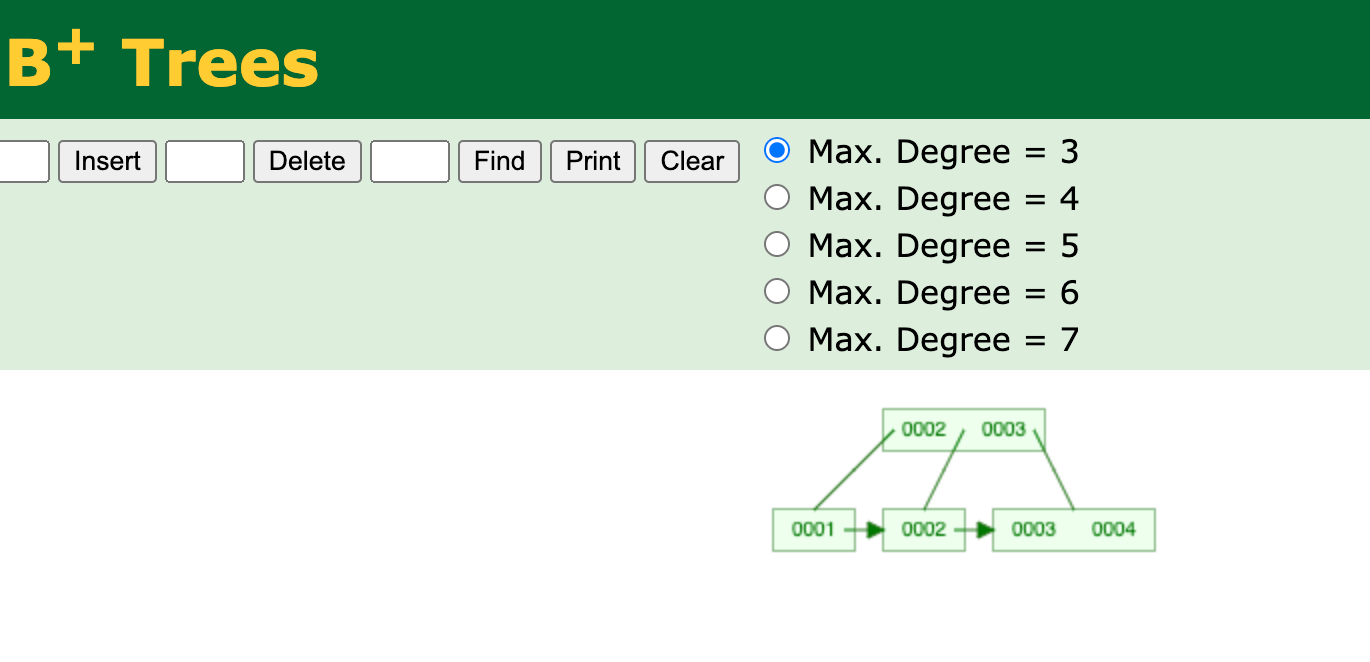
而对于internal_page的实现稍微复杂一点,由于指针比索引多一个,因此可以选择将第一个key标记为空,不存储任何东西,之后再更新索引的时候记得跳过0号位,从1开始。
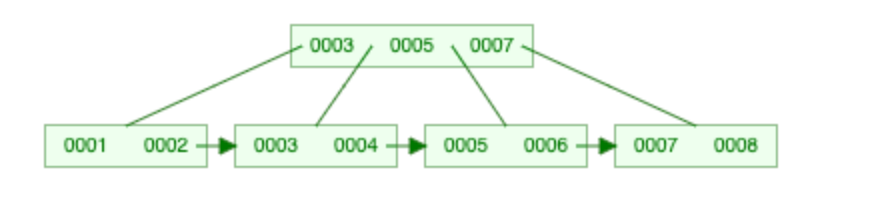
对于上图的0003 0005 0007则为:
Task2
只支持唯一索引,当插入重复的key时需要不执行并返回false。
在插入时需要进行最大值的检测:
- 对于内部节点为插入前子节点的数量(指针的数量)等于max_size
- 对于叶子节点为插入后kv键值对的数量等于max_size
写操作可能会导致根节点的更新,使用updateRootPageId进行更新,只要root_page_id需要更新时,就对其进行调用
GetValue
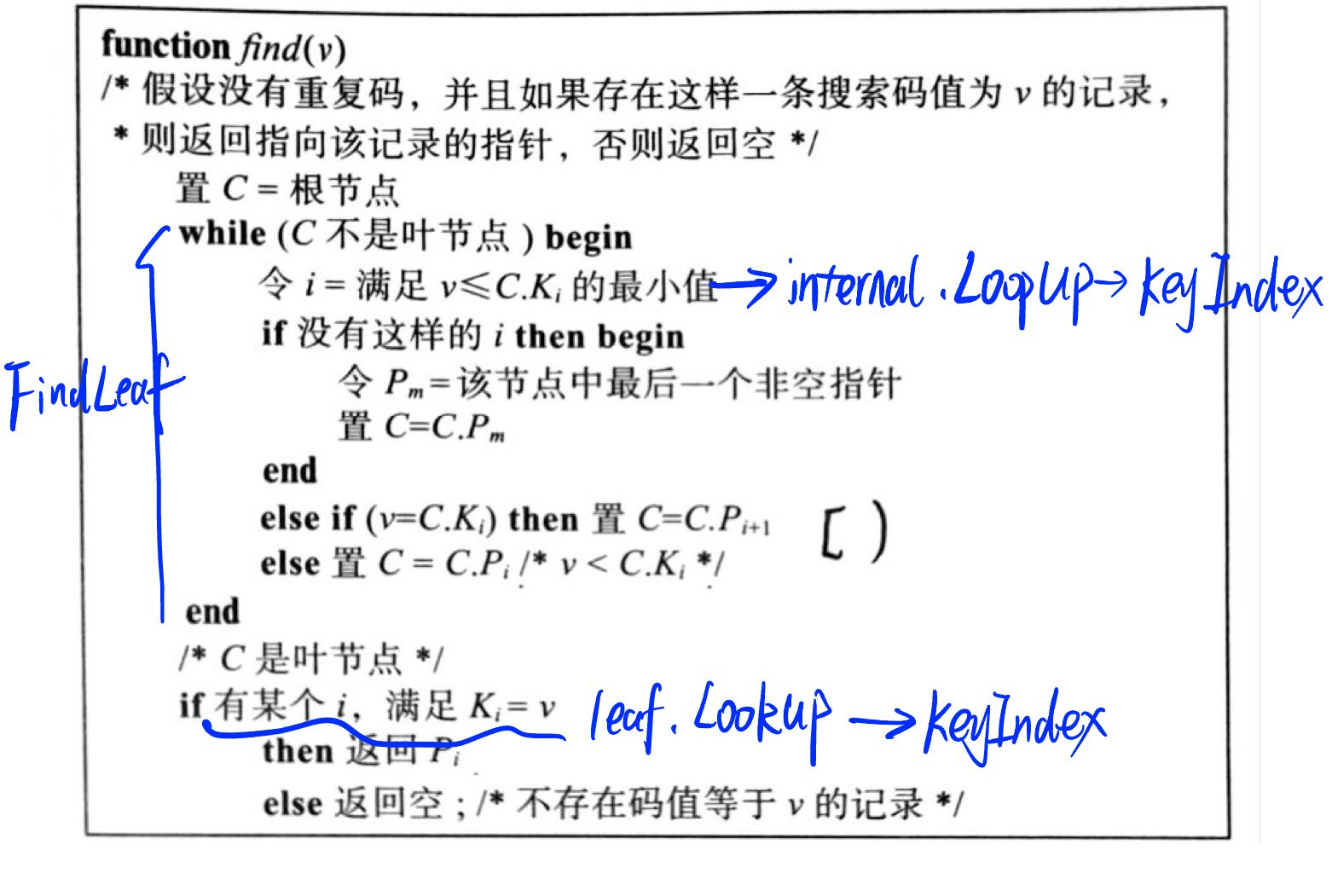
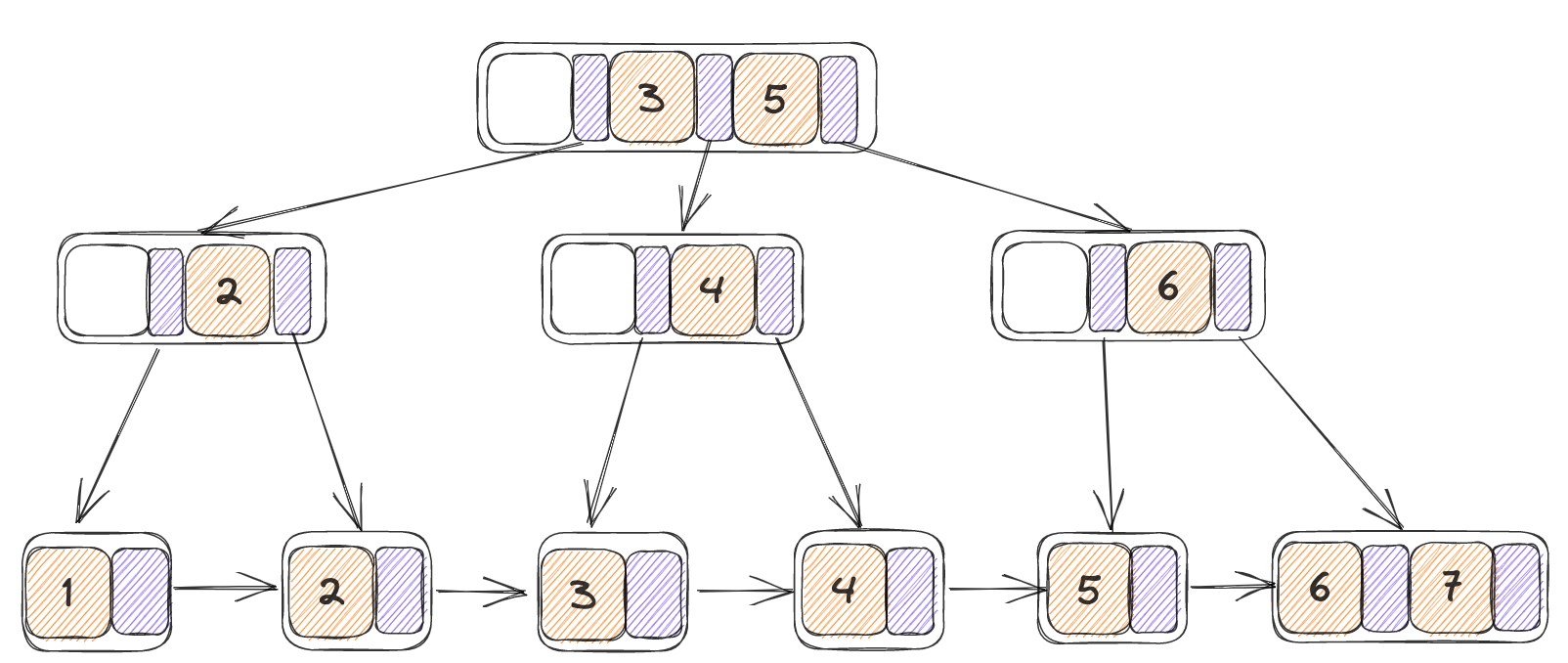
按照伪代码来严格实现,按照上图的划分方法进行封装,分别定义FindLeaf(),用于从根节点找到对应的叶子节点,在这过程当中需要在一个节点内部去搜索,因此分别定义一个LoopUp和KeyIndex:
- KeyIndex:调用std::lower_bound去寻找第一个 >= 的值
- LookUp:调用KeyIndex,根据返回的下表去判断是否获取到。
并且叶子节点和内部节点的搜索逻辑并不相同,因此需要分别定义。
| |
| |
Insert
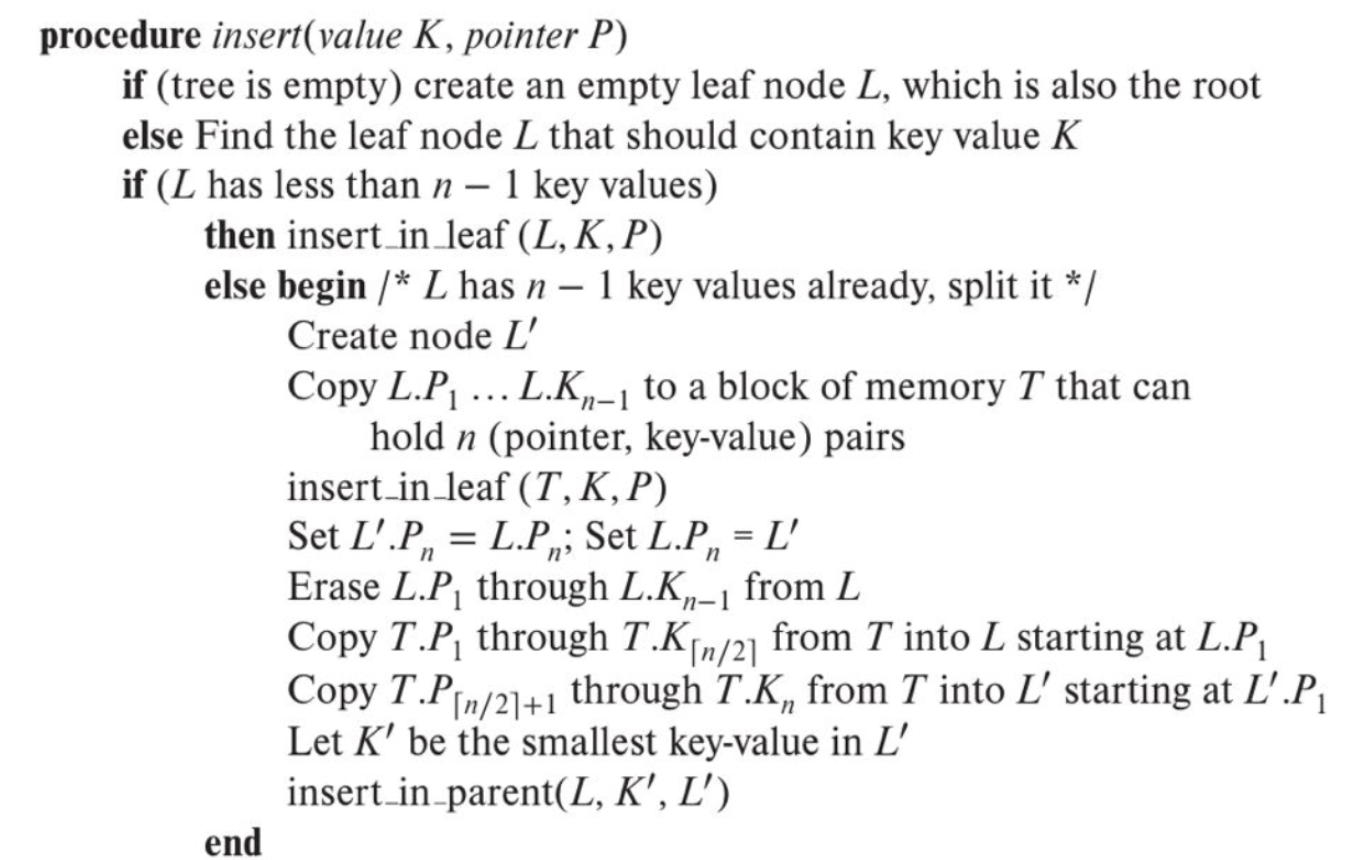
主要分为四个函数,分别为:
- 主体insert
- 当树为空时调用stratNewTree创建第一个节点
- insert_in_leaf
- insert_in_parent
Insert
insert本身并不实现什么具体逻辑,对StartNewTree和insert_in_leaf进行分类即可
| |
StartNewTree
创建一个全新的树,创建一个叶子节点将其作为根节点,并向其中插入一条数据
| |
Insert封装在Leaf_page当中,找到一个合适的位置向其中插入,并且对于重复的key,拒绝插入。
| |
Insert_in_leaf
对于不需要创建新树的情况,一律归类于向叶子节点当中插入数据
先通过GetValue当中实现的FindLeaf找到对应的叶子节点,之后直接向其中插入,如果叶子节点的大小没有发生变化,那么则证明为重复的key,直接返回即可。
如果大小发生变化但是没有超出最大值,无需进行分裂,也直接返回即可。
剩余的情况则是需要进行分裂。
叶子节点分裂
- 首先从buffer pool当中获取出一个新的Page用于承载分裂得来的新page
- 原本的节点保留minSize(maxSize / 2 )个数据,其他的全部拷贝至新的节点,最终的新节点当中的数据较多
当完成叶子节点的分裂之后,并将连接关系设置好之后,左右连接,parentId,之后再调用InsertIntoParent将右节点的第一个插入到父节点当中。
InsertIntoParent
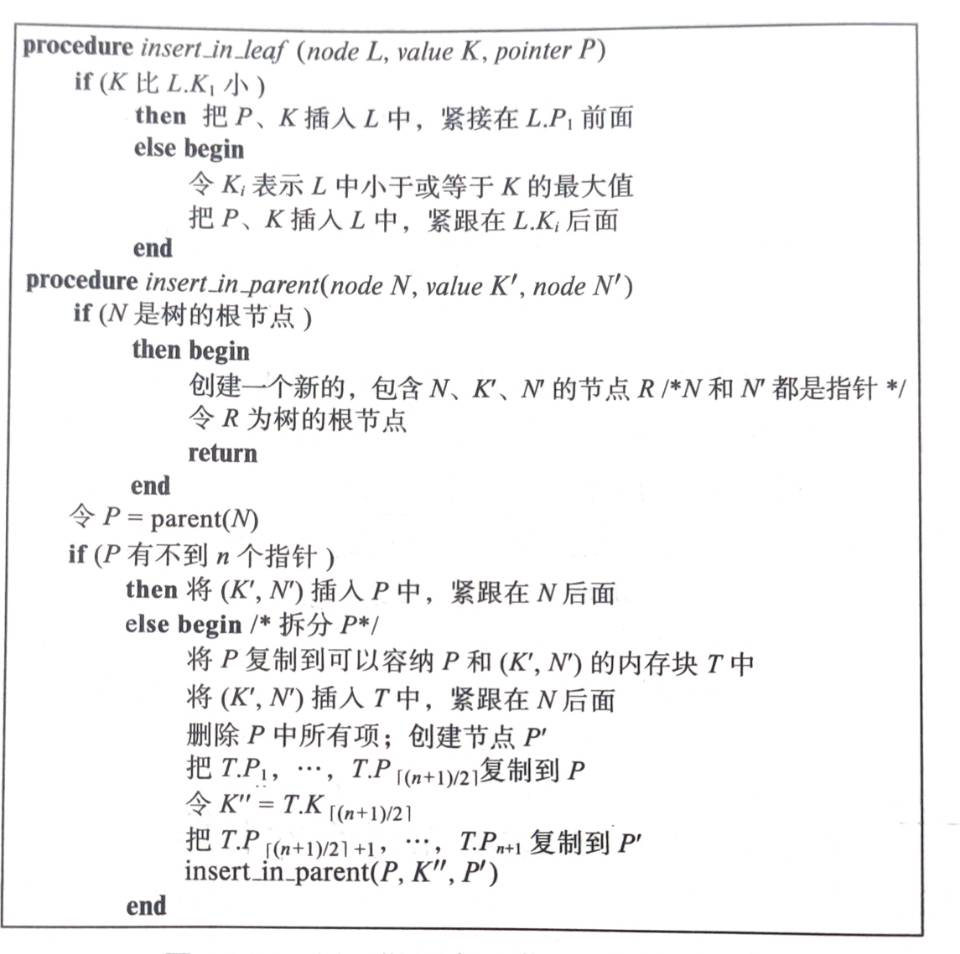
首先需要说明的是调用InsertIntoParent的时机一定是在叶子节点当中插入引发了分裂,之后将新分裂出的右节点的第一个key尝试插入到父亲节点当中
对于伪代码当中的一条条来看:
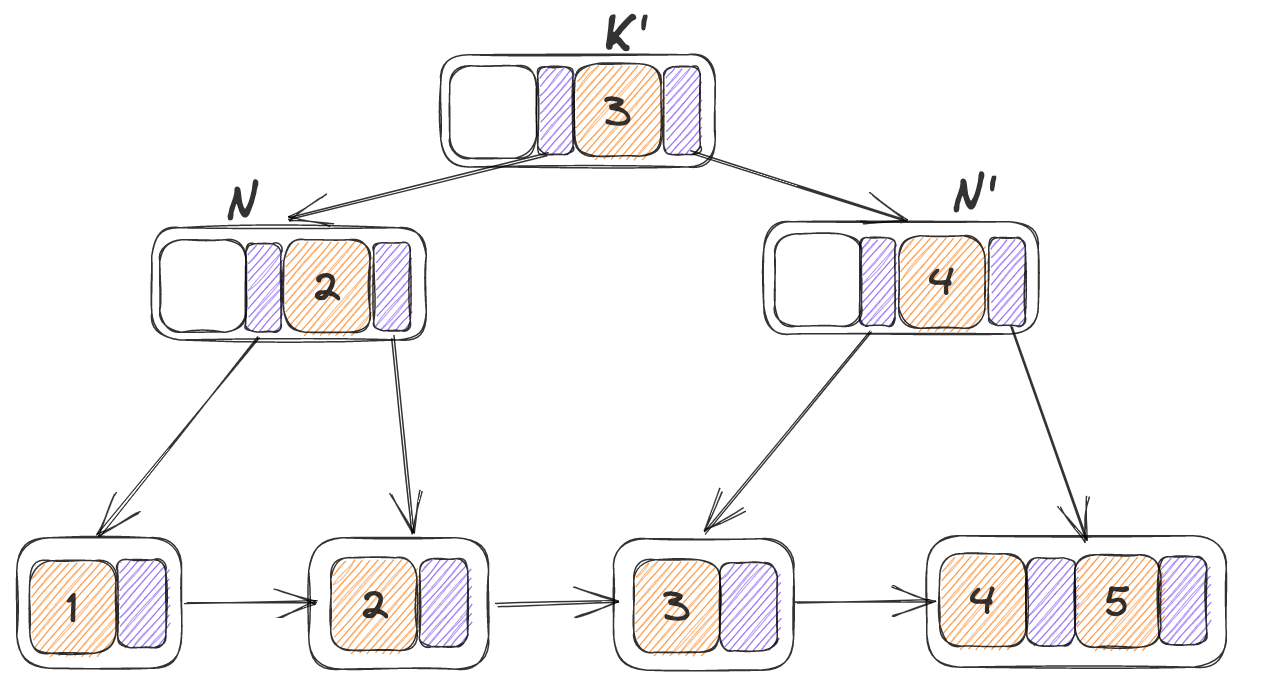
如果N为根节点:则创建新的根节点,insert_in_parent由叶子节点开始调用,而此时N为根节点则证明已经递归到对根节点进行分裂,N‘即为N的新兄弟节点,因此需要创建一个新的根节点,以N,N‘为子节点,
对应以下的情况:K’ = 0003
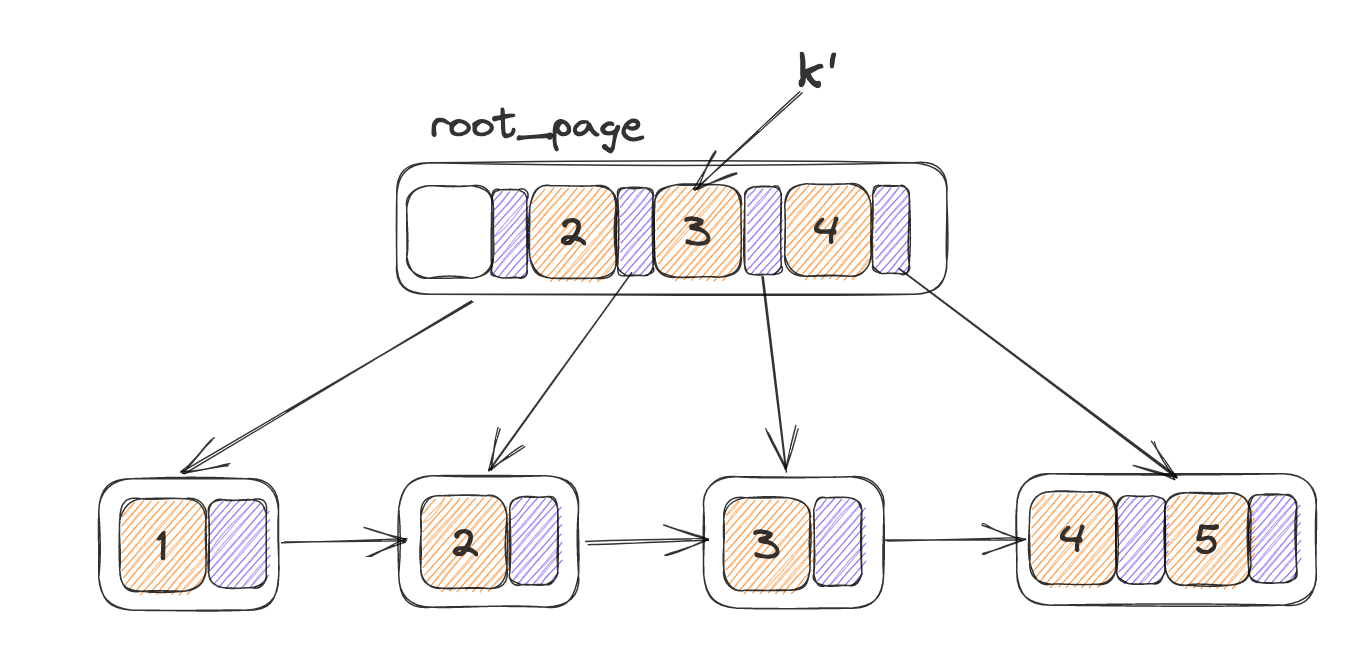
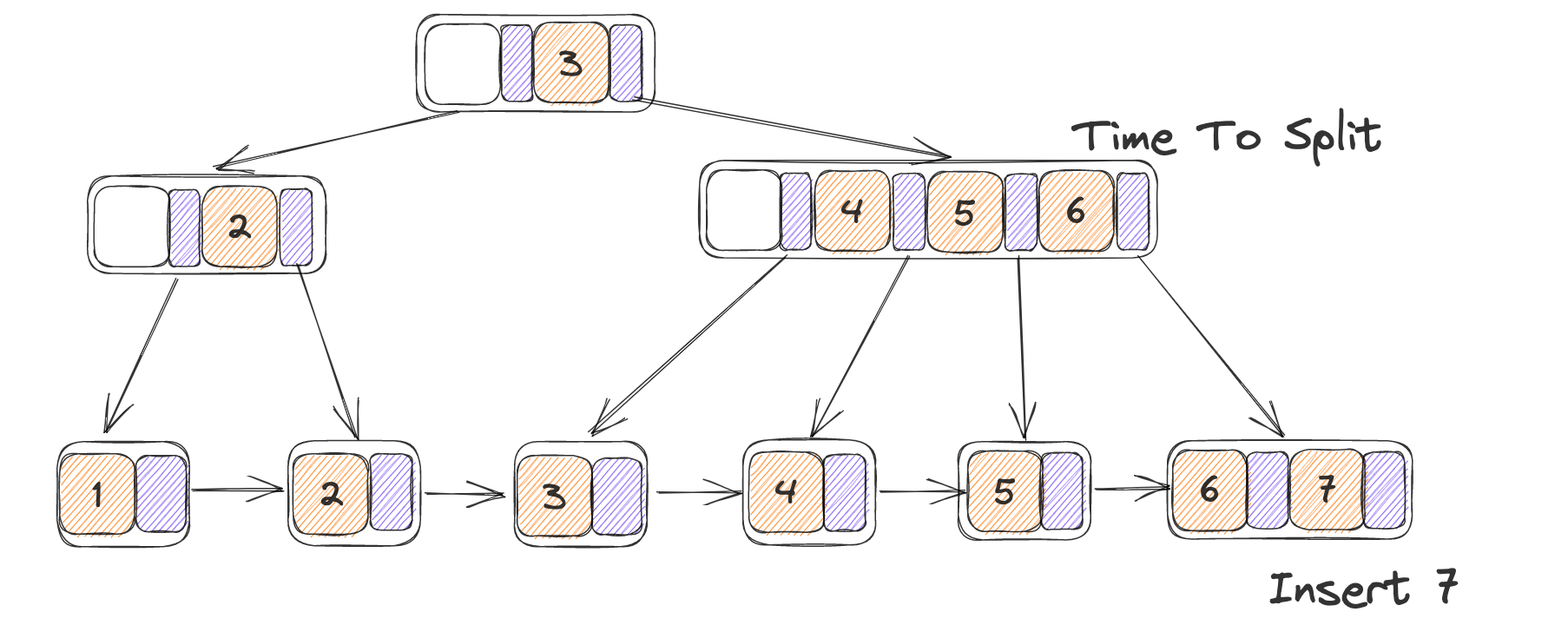
P有不到n个指针,还未满,在父节点当中直接插入并结束,没什么好说的
此时将6插入到父节点当中,父节点也无法容下,对父节点进行分裂,分裂完之后递归调用,在将5插入到上一级的父节点当中,此时可以容下5,因此不进行分裂,终止插入
在整个插入过程当中一个比较重要的实现就是分裂,分裂的过程严格按照伪代码所给的进行实现,对于叶子节点和内部节点在分裂上的实现有所不同,因此定义一个Split来对叶子节点和内部节点的数据迁移和指针指向更改。
- 创建一块内存块用于存放所有的之前的所有数据和要新插入的K’ N’,
- 将旧节点的所有的数据都拷贝到其中,新插入的K‘N’也加入到其中 。
- 完成节点的分裂,前一个节点保存min_size个节点,后一个节点保存其他的所有节点
按照伪代码描述,前一个节点应当保存(n+1)/2向上取整个节点,因此如果是基数个的话,那么前一个节点会比后一个节点多一个,但是个人认为这个是无所谓的,因为两种实现方法都能够达到平衡,在网上看到的两个B+树的演示动画也采用了两种不同的实现方式。
在分裂上的实现也不是很统一,由于对于叶子节点的分裂使用了先插入之后在判断的方式,因此直接分裂即可,对于内部节点需要在分裂前补上新的数据。伪代码当中的临时内存块其实不使用也可,直接在原节点上进行操作就行了。正确性上也可以得到保证(做完之后在网上看到了说直接插入会导致超出大小限制,但是我自己做下来按照直接插入的方式并没有出现什么问题)
| |
Delete
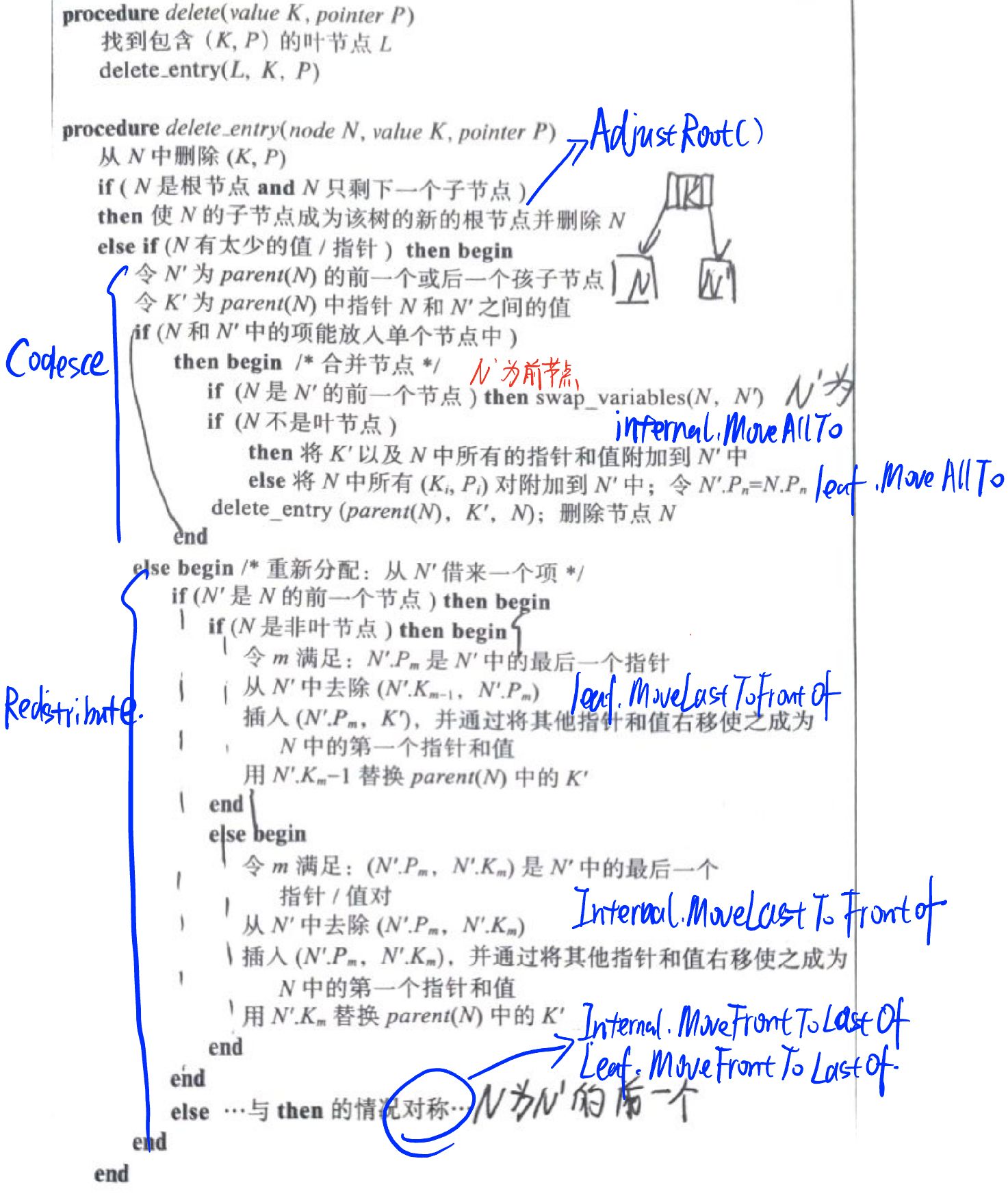
相对于插入来说,删除的逻辑就复杂的多,函数拆分方式如上,还是一条条的看。
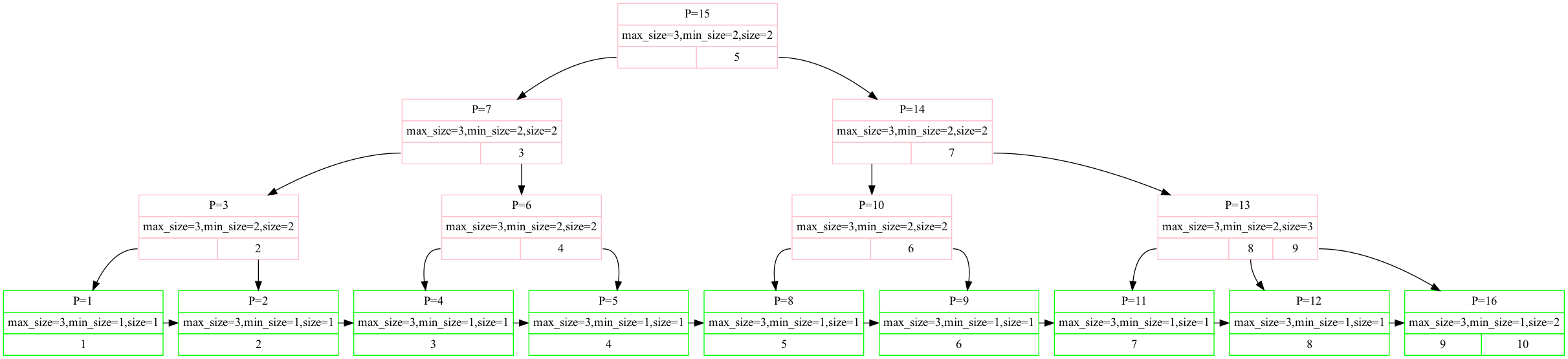
下面的例子全以MaxDegree = 4,MaxSize = 4,MinSize = 2来进行讨论
最开始通过FindLeaf() 找到Key所在的leaf_page,之后调用delete_entry进行删除,不过由于后续涉及到递归调用,因此可以把从leaf_page中删除的逻辑移到delete_entry外面
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18INDEX_TEMPLATE_ARGUMENTS void BPLUSTREE_TYPE::Remove(const KeyType &key, Transaction *transaction) { if (IsEmpty()) { return; } auto leaf_page = FindLeaf(key, transaction); auto *node = reinterpret_cast<LeafPage *>(leaf_page->GetData()); if (node->IsLeafPage()) { auto before_size = node->GetSize(); auto size = node->Delete(key, comparator_); if (before_size == size) { // cannot find the key; return; } } DeleteEntry(node, key); }
AdjustRoot
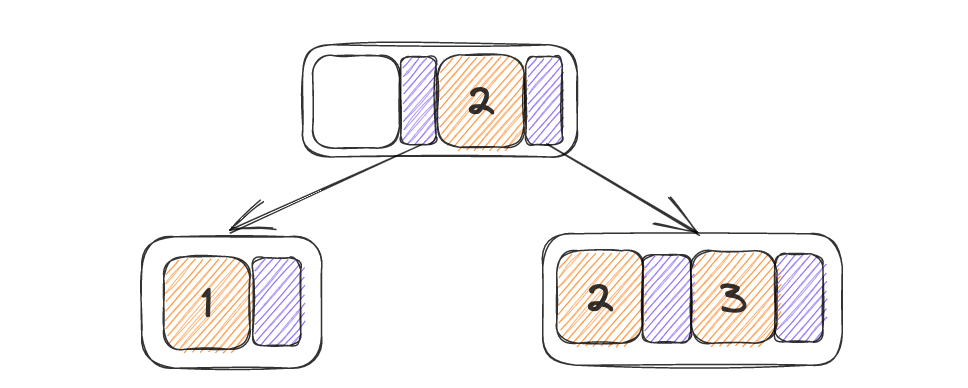
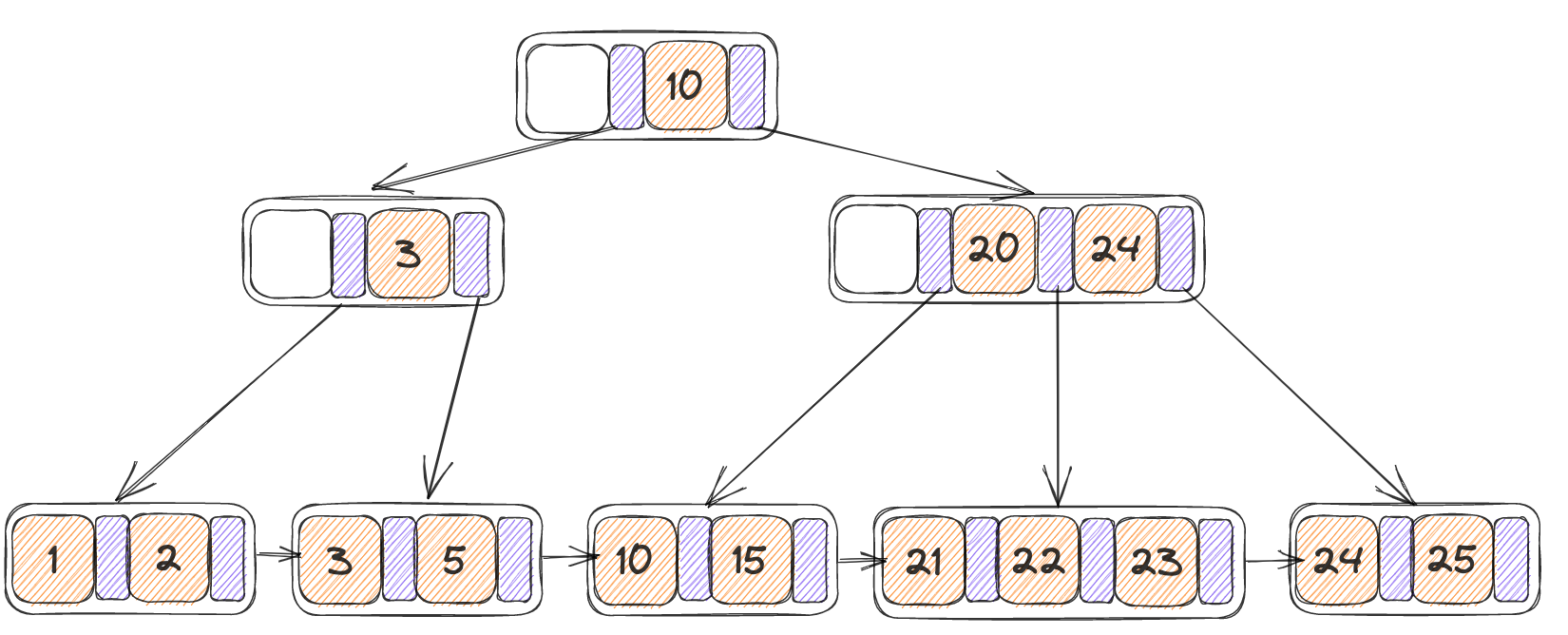
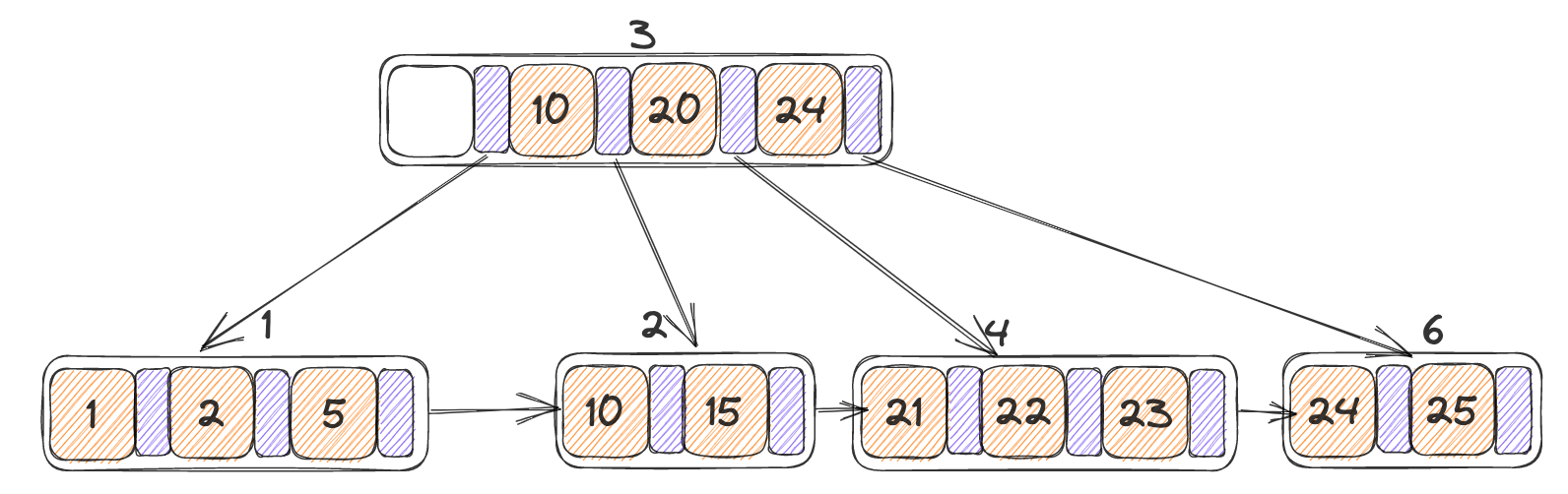
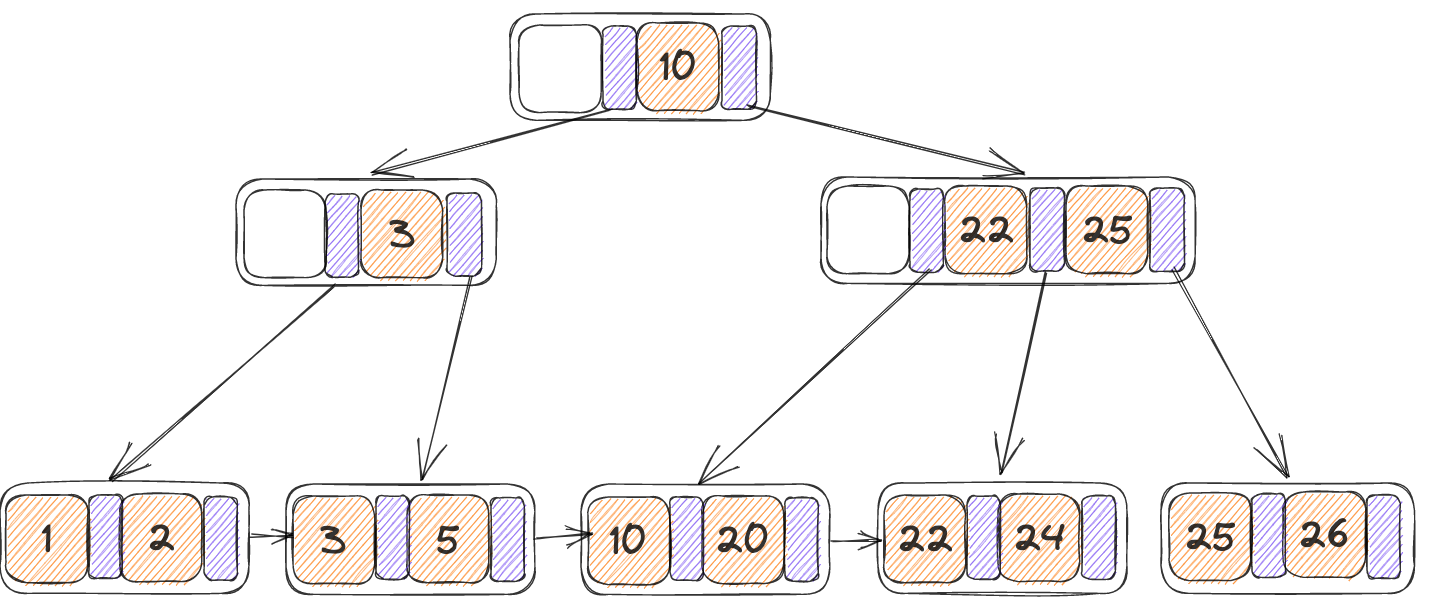
一棵树的初始状态如下,此时如果需要从中删除掉Key = 3,叶子节点当中的key不够,并且能够与左节点合并而不达到MaxSize,因此进行合并
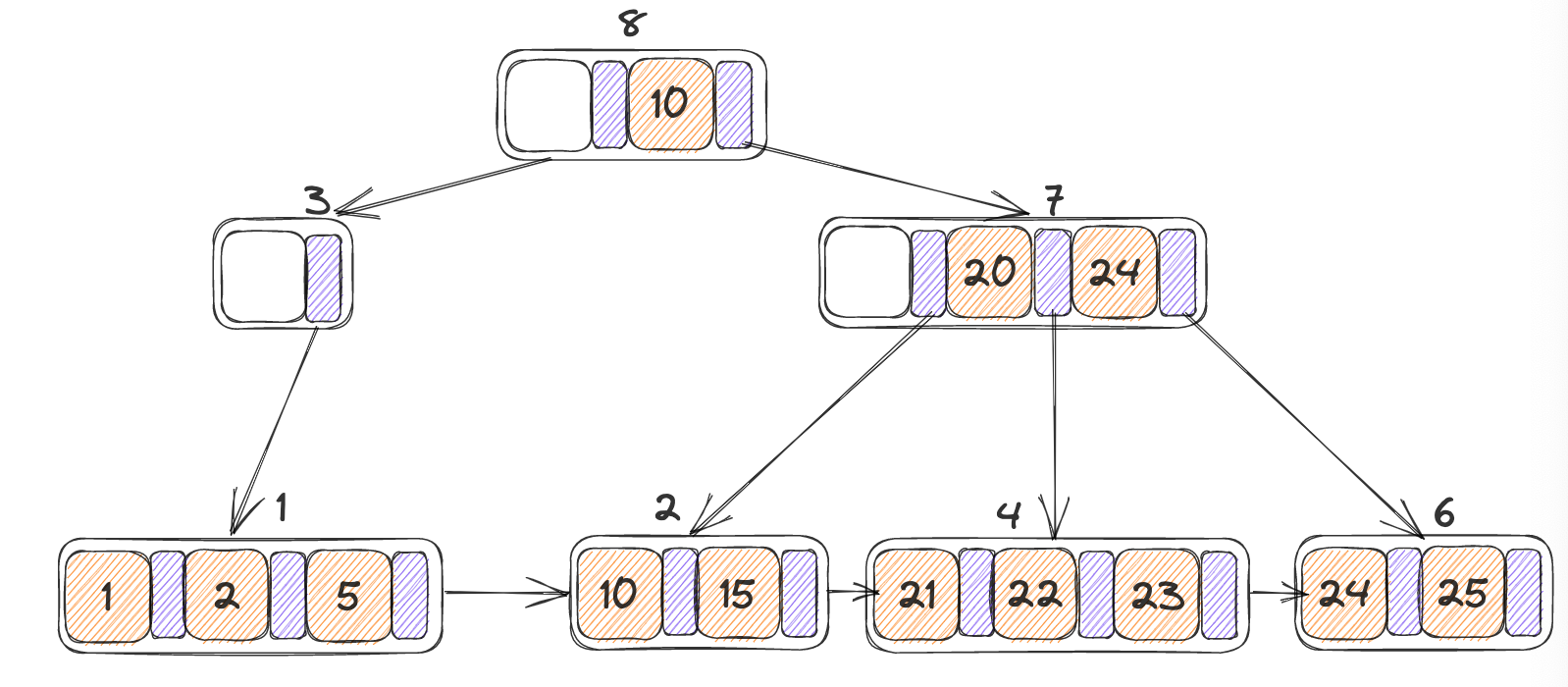
合并结果如下,此时的3号节点当中只有一个指针,小于min_size,同样的与右节点合并之后不会超过max_size,因此合并
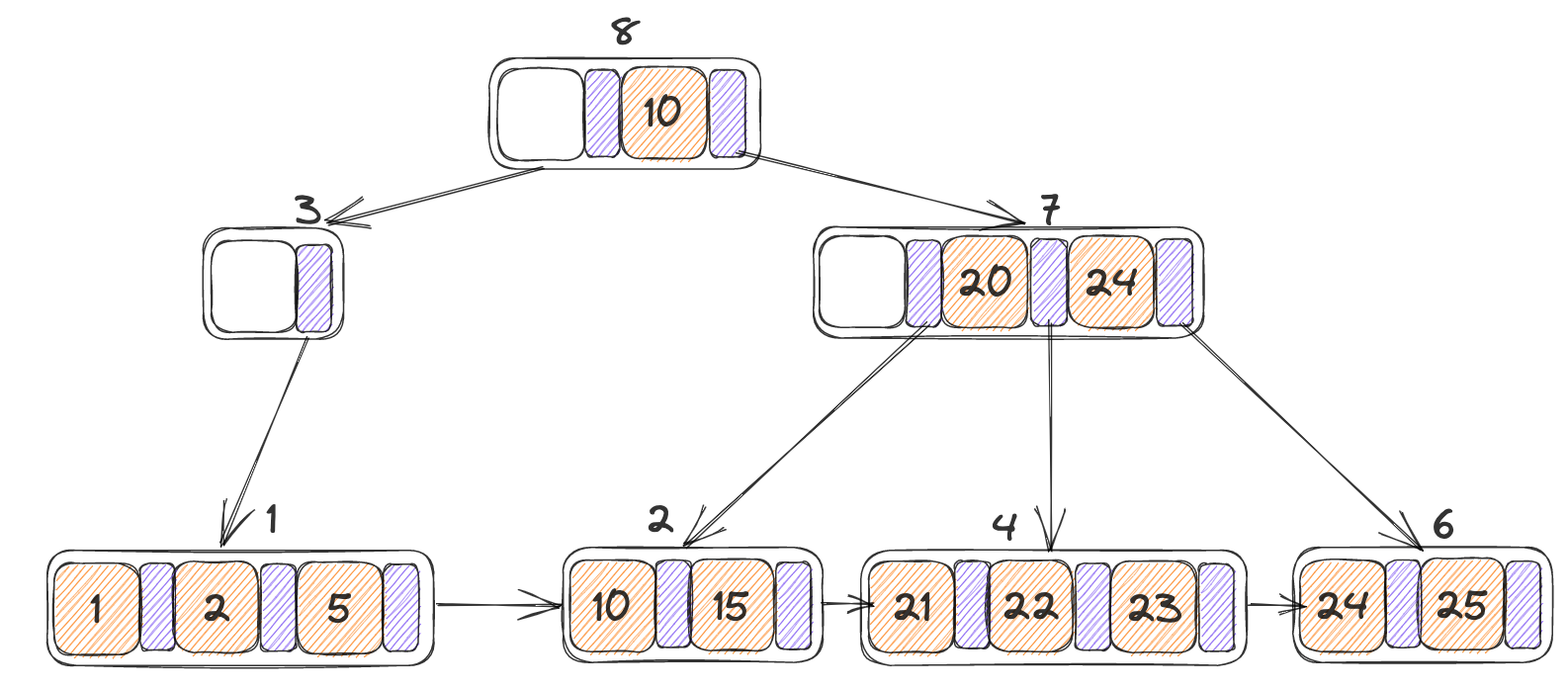
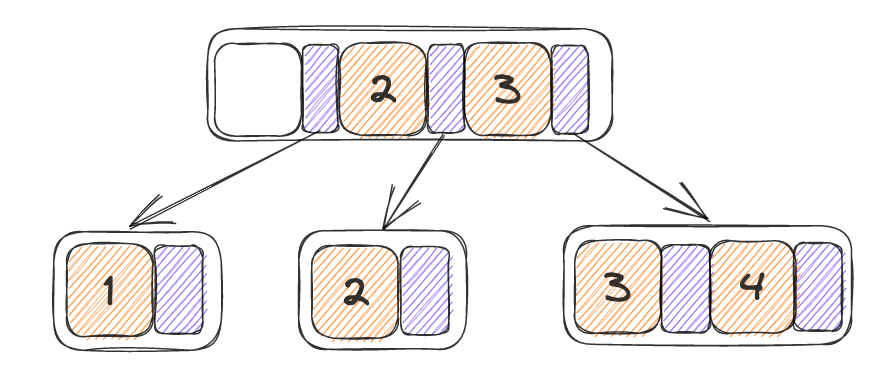
合并的结果如下,并且合并之后会在递归调用一次delete_entry,此时传入的节点即为parent(N),找到了根节点,并且此时的根节点只有一个孩子,达到了AdjustRoot的条件:
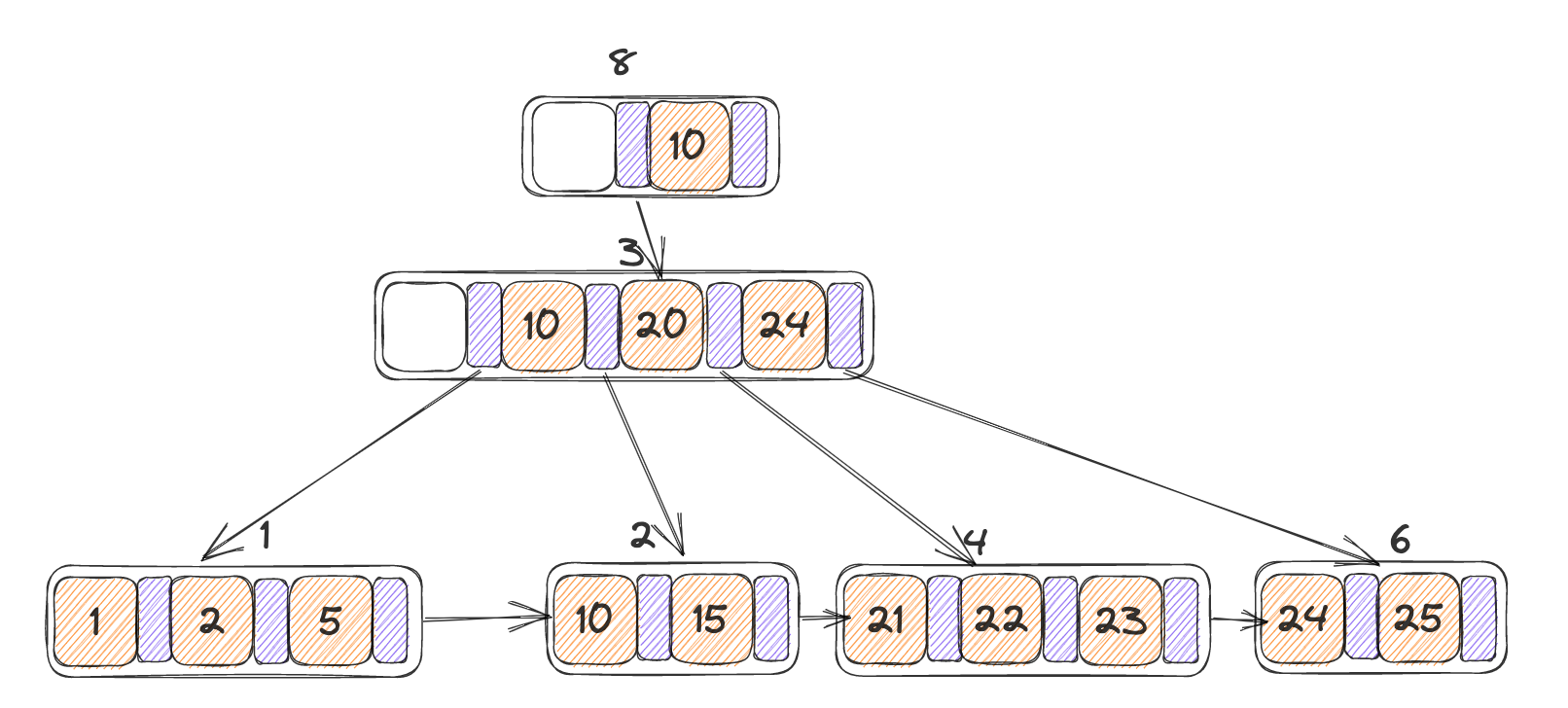
最终AdjustRoot的结果如下:
| |
Coalesce:
当两个节点合并之后仍小于MaxSize时,对两个节点进行合并,在逻辑上同样需要分为对叶子节点进行操作和对内部节点进行操作,由于在上述AdjustRoot的例子当中已经涉及到了根节点的合并和叶子节点的合并,因此就还用上面的例子
叶子节点的合并
初始树:
- 将3进行删除,之后发现其左节点与之合并之后仍小于max_size,此时的N为自身,N’为其左节点,K’为3,
- 执行合并,将右叶子节点当中的所有KV移动到左节点当中
- 递归调用delete_entry,在父亲节点当中尝试删除掉K’(3)
- 递归完之后清除掉N
最终结果如下,而当前的3号page当中只有一个指针,因此是不稳定的,并且大小允许合并,执行内部节点的合并
内部节点的合并
初始树,已经删除掉K之后
- N为自身节点,N’为其右节点,K’按照定义即为10,将N作为最终合并后的存储节点
- 因此先将K’添加到N当中,之后在将N’当中所有的KV添加到其中(不包括第一个空的K)
最终结果如下:
| |
Redistribute
同样需要分为叶子节点和内部节点来进行讨论,内部节点由于0号位Key为空,因此无法像合并那样直接交换顺序即可,而是需要实现一个逻辑上一样的对称操作。
叶子节点重分配
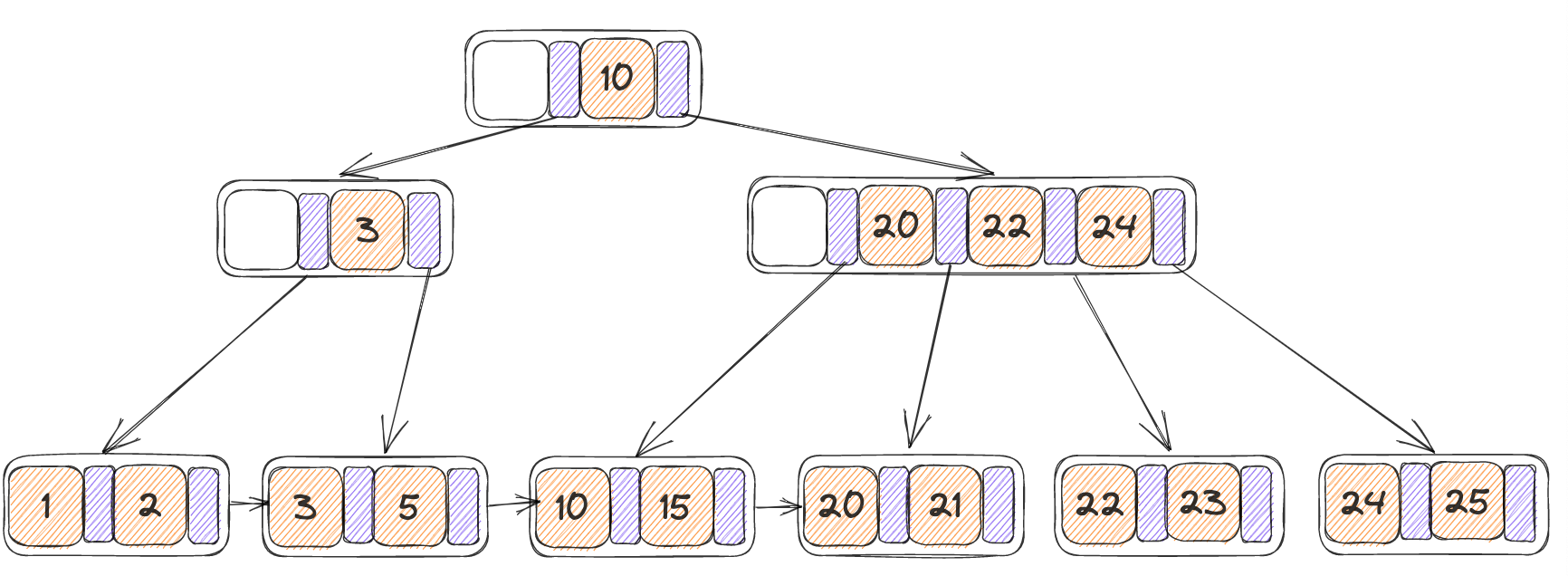
初始树:
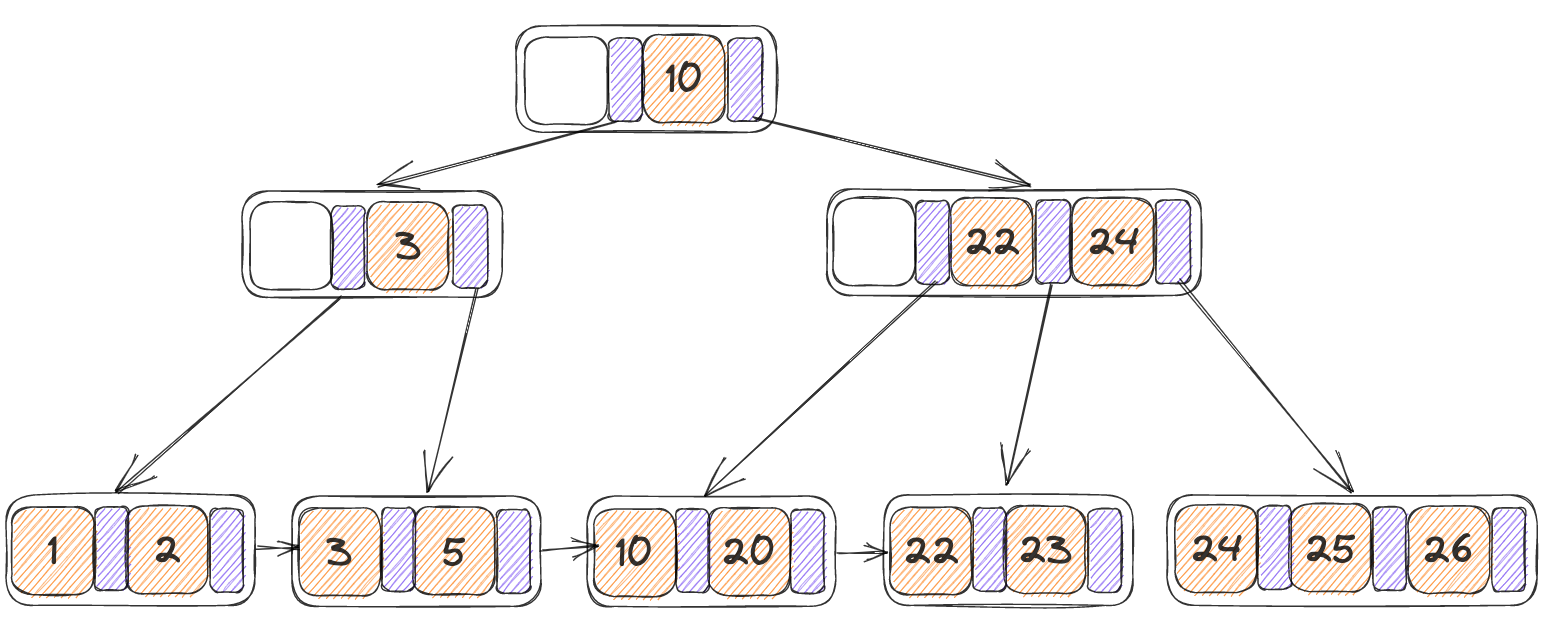
此时尝试从中删除掉23,此时该叶子节点当中就只剩下一个KV,小于min_size,并且无法和右节点进行合并,因此需要进行redistribute(代码逻辑中先判断是否能进行重分配,如果不能在后续判断合并,重分配本身不涉及到递归调用,因此对整个B+树的调整范围小,开销较小)
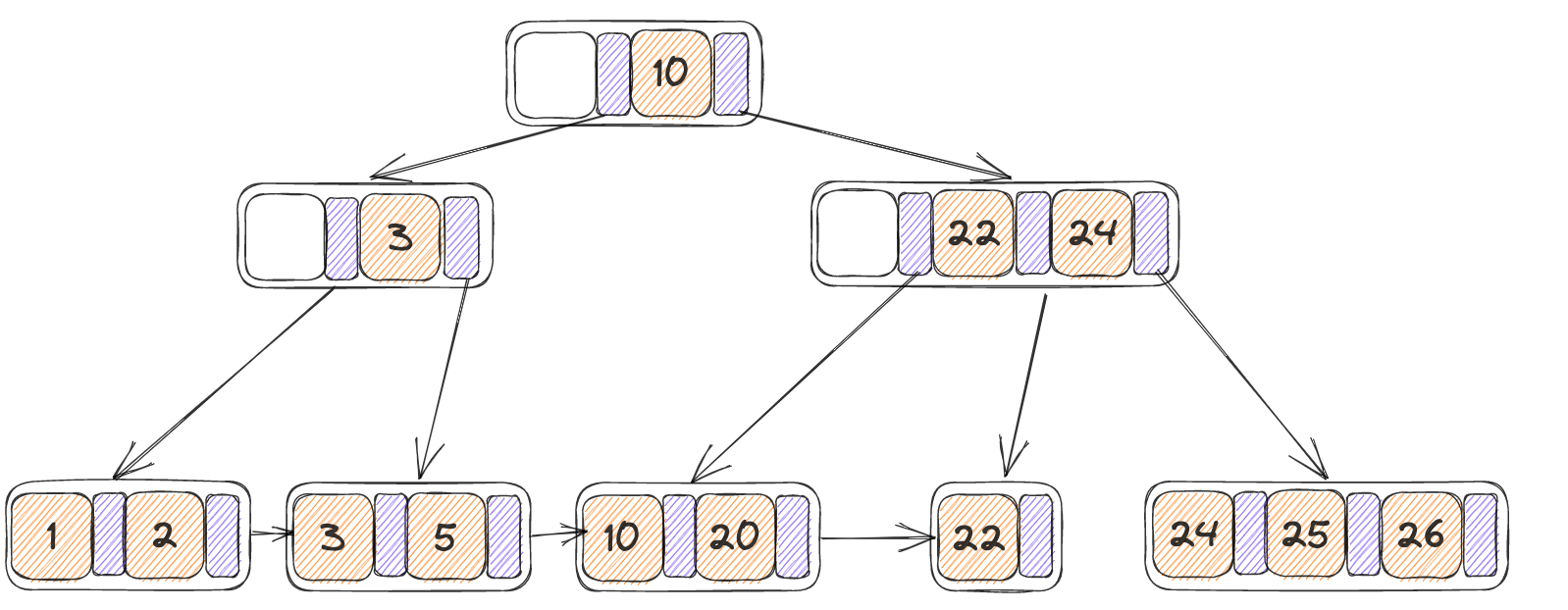
自身为N,右节点为N‘,将N‘当中的第一个KV移动至N的末尾,并且将parent当中N,N’中间的key替换为移动之后的N‘当中的第一个K(25),最终结果如下:
叶子节点的为完全对称的,因此只需要完全对称的实现即可,将第一个改为最后一个,逻辑上完全一致。
| |
内部节点重分配
初始树和从中删除掉3之后的状态分别如下:
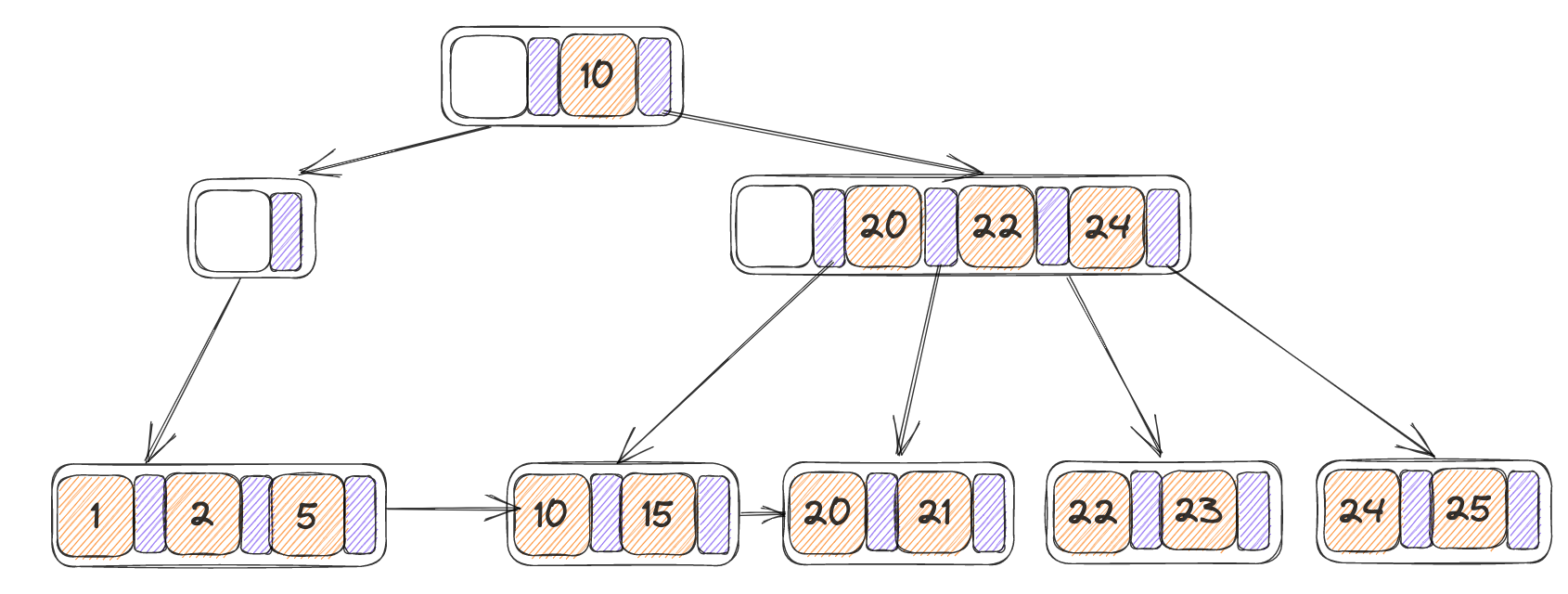
- 此时左侧只剩下一个指针,并且合并会大于max_size,因此进行重分配,N为自身,N’为其右节点
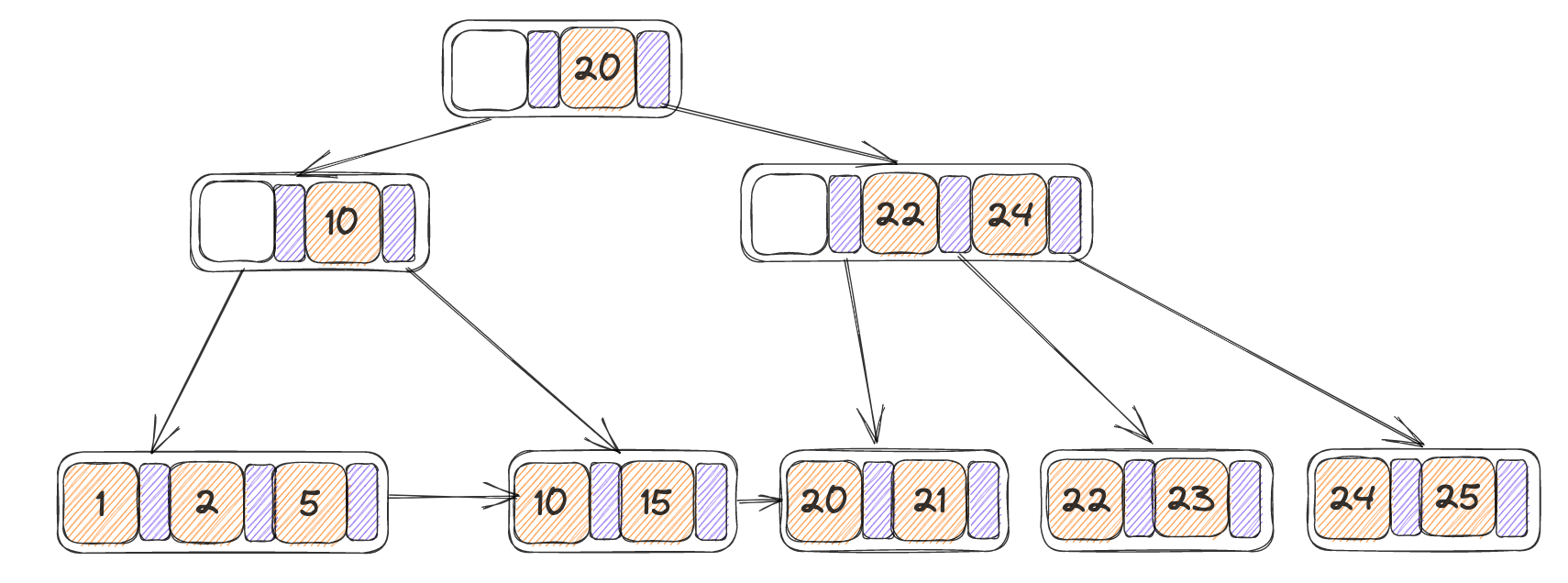
- 找到N’当中的第一个KV,记为(K1,V1),将其添加到N的末尾
- 找到在parent(N)当中的N与N’指针之间的K’,将N的最后一个K设置为K’,并将parent(N)当中的K’设置为K1
最终结果如下:
| |
对于内部节点的重分配,存在那么一点不对称的情况:
- 即上述例子为在左节点当中检测到需要进行合并,由于第一个空key的存在,K’的位置应当为index + 1,(index为N在parent当中的位置),而如果是从右侧检测到需要进行重分配,K’即为index
- 右侧向左侧添加时应当添加index = 1的KV,跳过空Key,左侧向右侧添加时,同样添加到一号位置
实现的时候注意一下即可。